
Problématique 2 : Programmer un robot pour qu'il soit autonome dans ses déplacements.
Compétences :
- Analyser le fonctionnement et la structure d’un objet, identifier les entrées et sorties. (Evaluation d'étape)
- Appliquer les principes élémentaires de l’algorithmique et du codage à la résolution d’un problème simple. (Activité 2 - Rapport d'activités)

Depuis 2014, Amazon.com Inc a installé plus de 200.000 robots dans ses entrepôts aux États-Unis et également en France depuis 2020. Cette nouvelle organisation promet de réduire les coûts d'exploitation de 20% et d'obtenir des délais de livraison plus courts notamment durant la période précédant Noël.
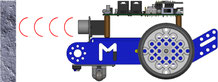
Les six séances vont permettre aux élèves de découvrir le fonctionnement du robot mBot. Il devront le programmer afin qu'ils puissent se déplacer de façon autonome sans aucun risque.
Nos robots : mBot Robot Kit, mBot Ranger et son programme


Logiciel mBlock
Ressources mBot
mBot : fichiers volumiques Solidworks
mBot : modélisation grabcad.com
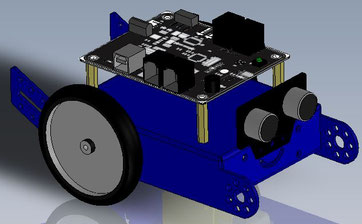
Présentation de mBot
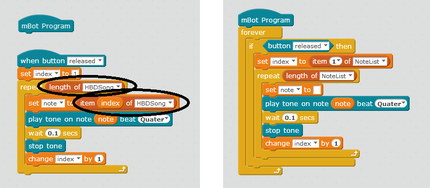
Utiliser mBlock pour programmer

1- Découvrir mBot
A - Piloter le robot mBot
Quoi faire ?
- Préparer le matériel
- Connecter le robot mBot à l'ordinateur
- Mettre le robot en marche
- Exécuter le logiciel mBlock
- Paramétrer mBlock
- Téléverser le programme par défaut dans mBot
- Piloter le robot en mode manuel grâce à la télécommande.
Comment faire ?
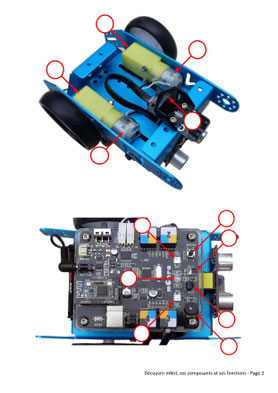
B - Découvrir mBot, ses composants et ses fonctions
- Compléter au crayon de bois les documents ci-dessous :


- Ressources
C - Comprendre le fonctionnement en identifiant les éléments des chaînes d'énergie et d'information de mBot
- Ouvrir le fichier avec le logiciel LibreOffice Draw après l'avoir téléchargé en cliquant sur l'image ci-dessous :

- Ressource : le fonctionnement de mbot, sa chaîne d'énergie et sa chaîne d'information
- L'enregistrer sous H:\
- Déplacer les vignettes afin de reconstituer correctement le schéma expliquant le fonctionnement de mBot
- Notez vos prénoms, noms et classe
- Imprimer chacun un exemplaire en couleurs
Point d'étape
Des learningapps à faire et à refaire pour s'entraîner ! !
2- Programmer mBot
Évaluation des travaux pratiques
Consignes pour le rapport d'activité

Cliquer pour télécharger les consignes
Grille d'évaluation du rapport d'activité

Cliquer pour télécharger la grille d'évaluation
Attention important : pour chaque programmation, vous devez, dans le menu "Edition" du programme mBlock, cocher "Mode Arduino" ! (Le panda ne doit pas être visible à l'écran).
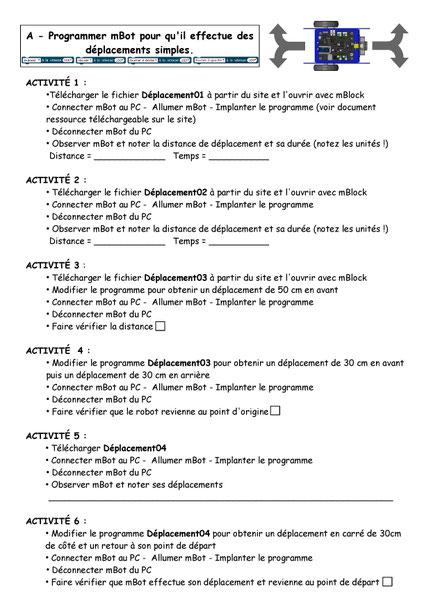
A - Programmer mBot pour qu'il effectue des déplacements simples





Travail à réaliser
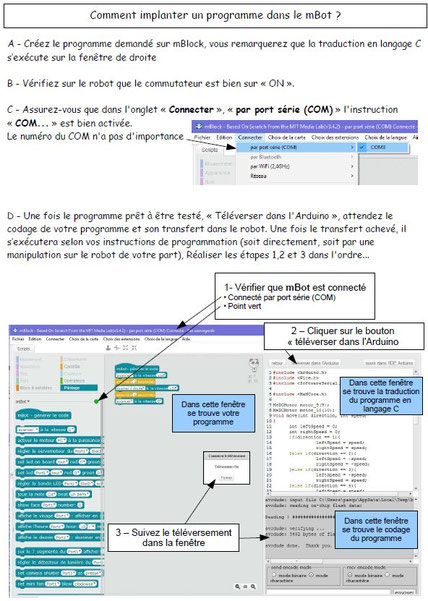
Ressource : fiche-guide pour implanter un programme
Programmes à télécharger :

Déplacement01

Déplacement02

Déplacement03

Déplacement04
Remarque pour l'activité 6 : (déplacement en carré)
Vous devrez utiliser le bloc


Pour aller plus loin...
A- Faire déplacer le robot en "triangle"
B- Faire déplacer le robot en "cercle"
B - Programmer mBot pour qu'il réagisse aux consignes de la télécommande
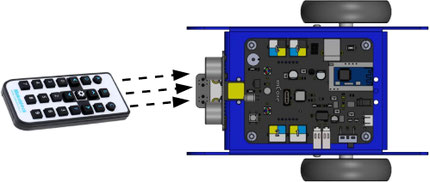
Travail à réaliser
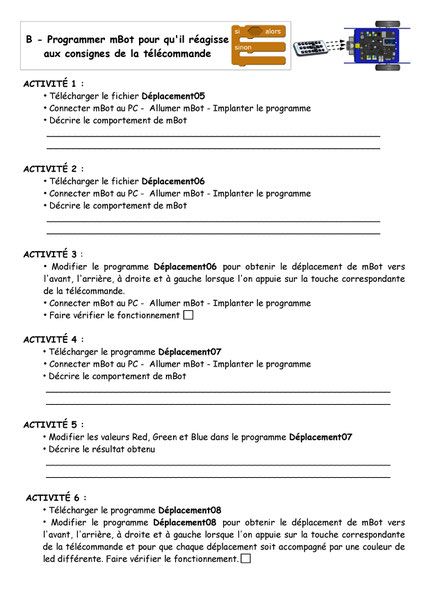
Ressource : résultat attendu
Programmes à télécharger :

Déplacement05

Déplacement06

Déplacement07

Déplacement08
Pour aller plus loin...
A- Faire jouer un son au robot lorsque celui-ci recule...
B- Faire clignoter les leds lors des déplacements...
C - Programmer mBot pour qu'il suive une ligne noire au sol


Travail à réaliser
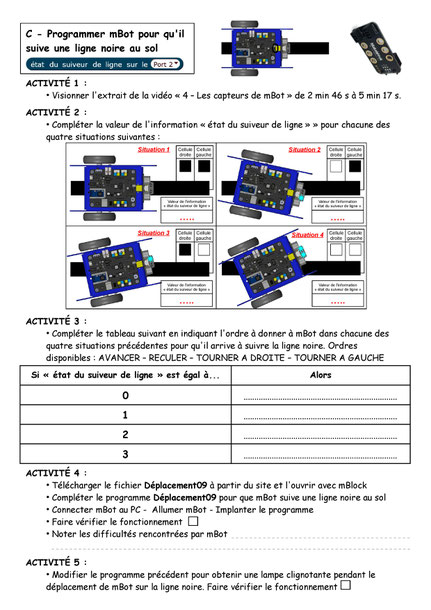
Ressource : résultat attendu
Ressource : quelques explications sur le détecteur de ligne noire - Extrait de 2 min 46s à 5 min 17 s
Programme à télécharger :

Déplacement09
Pour aller plus loin...
A - Modifier le programme pour qu'il démarre seulement après avoir appuyé sur la touche A.
B- Modifier votre programme pour stopper le robot lorsque l'on appuie sur la touche B.
D - Programmer mBot pour qu'il évite des obstacles


Travail à réaliser

Ressource : quelques explications sur le capteur d'obstacle à ultrasons - Extrait de 0 min 39 s à 2 min 44 s

Programme à télécharger :

Déplacement10
Pour aller plus loin...
A - Vous pouvez implanter un programme dans le robot qui lui permet de suivre une ligne et de stopper si un obstacle se présente devant lui...
B- Vous pouvez commander le robot avec la télécommande avec :
- La touche A : Commande manuelle
- La touche B : Suiveur de ligne simple
- La touche C : Suiveur de ligne avec évitement
3- Évaluation de la problématique 2
Activités facultatives
A - Programmer mBot Ranger avec mBlock
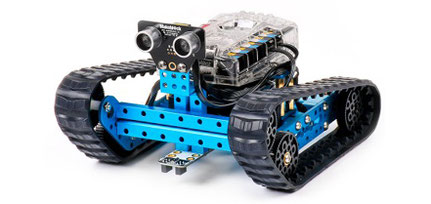
1 - Télécharger le programme ci-dessous et tester le sur mBot Ranger

2 - Programmer mBot ranger pour qu'il suive une route blanche, tout en indiquant sur son dos le sens de déplacement avec une del.

Saint Gabriel - Saint Michel
32 Rue du Calvaire
85290 Saint-Laurent-sur-Sèvre

Autres sites du collège...